Human agents that are involved in work activities employ their attention and decision making resources in exchange for experiences and rewards that may be physically, socially, economically and emotionally valued. When the human agent attains the flow state during work, their perception of physical effort diminishes, and their perception of emotional rewards increases.
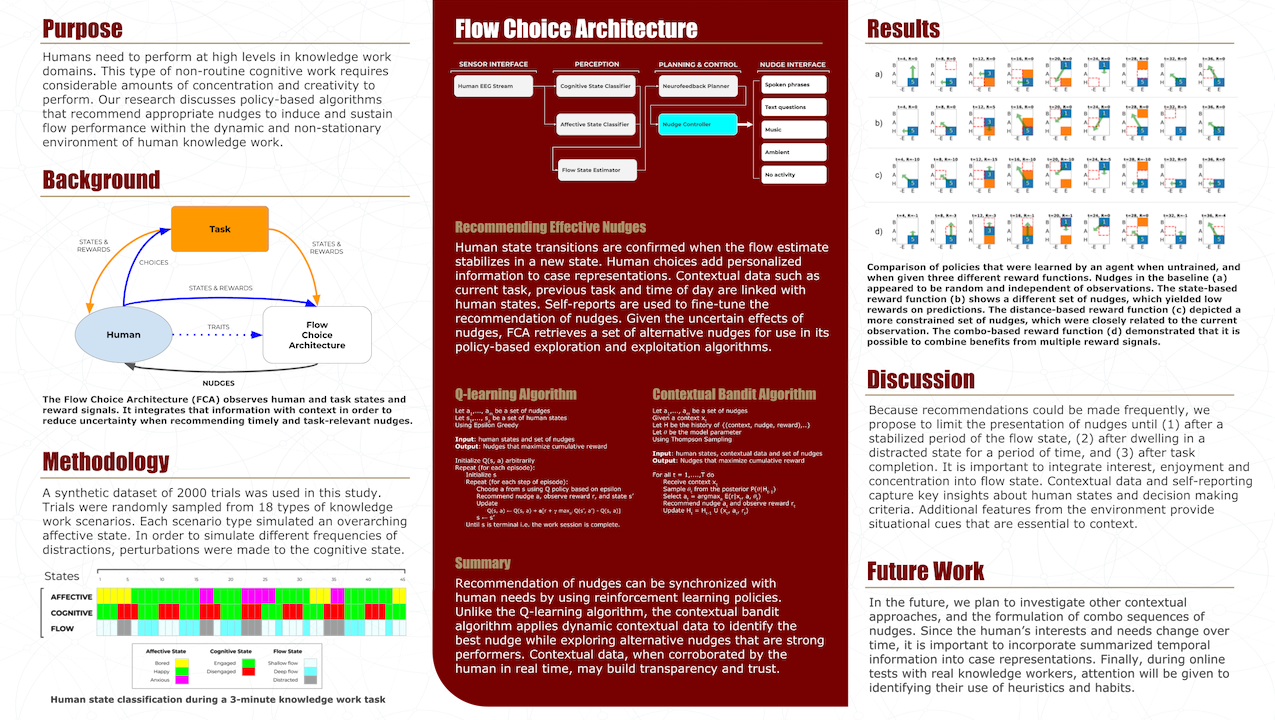
In this work, we develop a computational model called the flow choice architecture, and simulate different approaches to policy-based utility-maximization using targeted choice recommendations. The results demonstrate a flow choice architecture that provides timely nudges to human agents in order to establish and maintain the flow state in a way that increases their productivity and sense of work accomplishment.

